
Tag: Serial
-
IRE – Control system (Part 6 of 7)
—
by
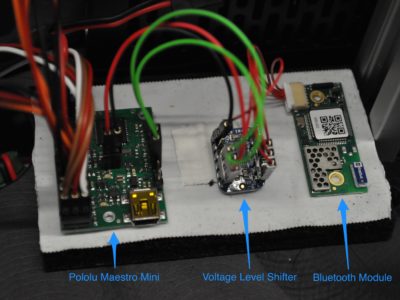
The last post covered how the video signal is transmitted. However, a communication channel back to the robot is also necessary. Over this channel the signals for the gimbal and the robot are sent. The smartest solution would have been to transmit the USB of the Oculus Rift and the gamepad directly to the onboard…