
Tag: Wireless
-

IRE – Video & audio transmission (Part 3 of 7)
—
by
How can I wirelessly transmit 1080p@60fps with short latency? That was one of my biggest questions. Most FPV systems are analog, which results in a bad image. That’s why I wanted to have a digital solution. First I thought of using Wifi, but soon I realized that it would have too much latency. Some people…
-
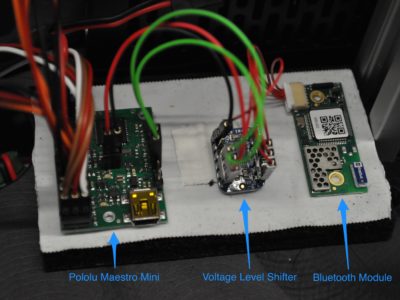
IRE – Control system (Part 6 of 7)
—
by
The last post covered how the video signal is transmitted. However, a communication channel back to the robot is also necessary. Over this channel the signals for the gimbal and the robot are sent. The smartest solution would have been to transmit the USB of the Oculus Rift and the gamepad directly to the onboard…